Nel link manca il prezzo. E anche se questo sistema motorizzato fosse il non plusultra, suppongo che il prezzo debba essere proporzionato allo scopo che deve raggiungere. Poi io parlo per me... se invece per te il prezzo non è un problema e neanche l'allestimento di un impianto elettrico per comandare il motore del sollevatore, mi pare che il problema sia risolto e la discussione possa chiudersi qui.
Se invece si rimane nell'ottica di un sistema "economico" e funzionale, allora mi permetto di riprendere un attimo il sistema del porta abiti estraibile.
Difatti, l'avevo abbandonato perché a prima vista anche questo sistema non arrivava a portare 20kg.
Ma rimuginandoci forse ho capito come fare per poter aumentare la portata del meccanismo... ma ripartiamo daccapo.
Allora, immaginando il ripiano portante il robot attaccato con due catene al tubo che ruota in fuori: con questo sistema l'abbassamento del ripiano alla fine risulterà è anche troppo. Quindi i due bracci portanti il tubo oscillante si potrebbero anche fare più corti... e più corti sono e più peso portano.
Poi una domanda: all'inizio si è parlato da 20kg... ma questi comprendono solo il robot oppure anche tutti gli accessori? Perché se gli accessori sono compresi nel peso, potendoli collocare a parte si risparmierebbe già un po' di peso. Ma facciamo pure conto che il peso da considerare non possa scendere sotto i 20Kg. Se, come detto, si riduce la lunghezza dei bracci dell'appendiabiti estraibile si aumenta in proporzione la portata del sistema.
Poi hai detto che il pensile lo devi ancora progettare e fare su misura... e va bene... ma almeno la quantità di abbassamento del ripiano portante il robot rispetto al piano inferiore del pensile e l'ingombro del robot stesso, li puoi quantificare?
Comunque, ipotizziamo che il pensile della cucina sia a 60 cm (ho misurato adesso i miei) dal top, quindi di certo 60 cm di calata bastano e avanzano. Quindi per praticità immaginiamo una calata di 50cm, per fare conto pari. Ora sono andato a misurare i bracci del mio appendiabiti estraibile dell'armadio di camera e ho visto che sono di 80cm, quindi sono sovradimensionati per la calata che ci serve a noi.
Per cui: da 80 a 50cm ci sono 30cm da guadagnare e così facendo il peso che potrà portare la struttura rientrerà preciso nei 20kg. Se poi, come detto prima, si possono mettere separati alcuni accessori, tale peso si ridurrà ulteriormente.
Quindi partendo dal presupposto che come peso ci stiamo, ora si tratta di mettere a punto la modifica all'appendiabiti per poter accogliere il ripiano aggiuntivo portante il robot.
All'inizio avevo pensato ad una gabbia sospesa sul palo portante dell'appendiabiti ma lo stesso scopo si raggiunge ugualmente con 2 catene, tipo altalena per capirsi. Quindi due anelli che girano sul palo portante, da cui partono due catene che vanno a ancorarsi al piano portante il robot.
Vediamo le fasi di lavoro:
1) abbiamo i bracci perfettamente in verticale che si trovano al centro della profondità del pensile
2) prendiamo il tirante di abbassamento (che ruota sul tubo portante) e lo tiriamo giù, fino a battuta
3) mentre il palo portante oscilla verso l'esterno del pensile il piano di base portante il robot rimane orizzontale per il suo peso stesso, anche se può oscillare qualora venga spinto
4) adesso abbiamo il piano portante il robot arrivato a 10 cm dal top, a fine corsa e in posizione di riposo, e anche dopo aver estratto il robot il sistema rimane fermo a riposo.
5) adesso, appena spingiamo verso l'alto il ripiano, e appena superiamo il suo punto morto, entra in funzione la molla a gas di bilanciamento del meccanismo che agevola il ritorno del ripiano dentro il pensile. Quindi con la barra/tirante spingiamo il tubo portante fino a che sarà rientrato tutto dentro il pensile, fino a superare l'altro punto morto, oltre il quale i bracci non possono tornare giù se non tirati con una certa forza... appunto per fargli superare il punto morto di sicurezza. FINE
E ora il sistema è pronto per una nuova manovra di discesa.
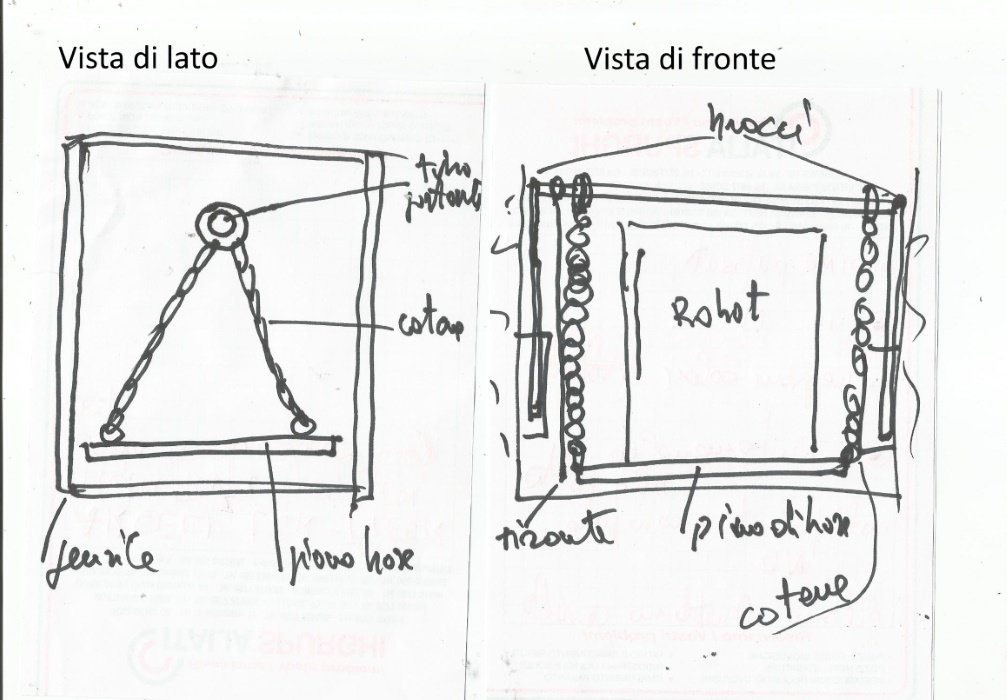
Qui sotto uno scarabocchio fatto al volo, solo per rendere un po' l'idea. Se interessa poi lo si può portare in bella copia e magari mettere a punto tutti i dettagli anche al fine di migliorare ulteriormente il sistema... altrimenti non credo serva insistere ulteriormente su questa soluzione.