Robot Explorer Junior
Inviato: ven 04 mag 2012 10:39 pm
Sono un informatico con la passione del faidate, quindi quale migliore occasione di unire le due passioni e costruire qualcosa che sia programmabile come un Robot?
E' questa la ragione per cui, circa 10 anni fa, ho costruito un piccolo Robot Explorer Junior e con questo ho partecipato ad una competizione organizzata in una scuola di Roma.
Che cos'è un Robot Explorer Junior?
E' un piccolo robot in grado di muoversi autonomamente in un ambiente evitando degli ostacoli posti in posizione fissa ma sconosciuta all'interno del campo di gara ed in grado di rilevare delle sorgenti luminose poste anche queste in vari punti del campo:
https://www.pacinottiroma.it/robotica/ROBOTEXPLORER.pdf
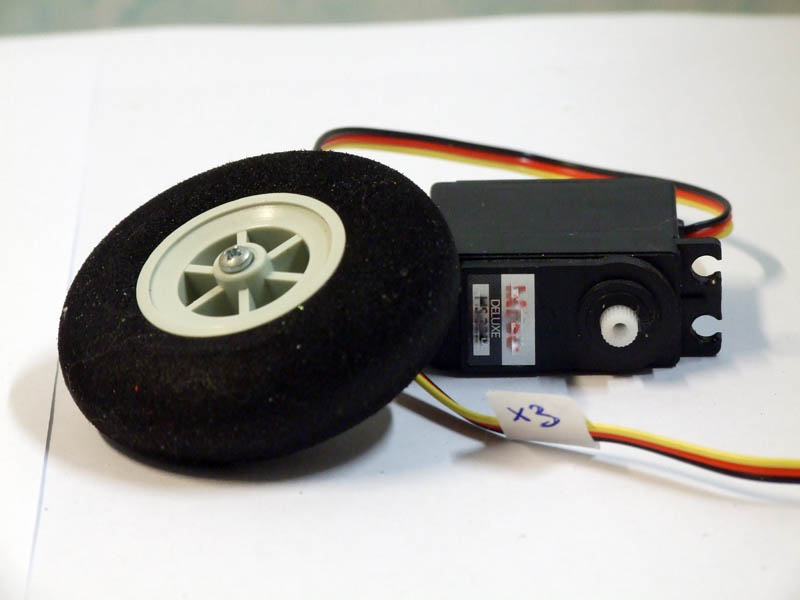
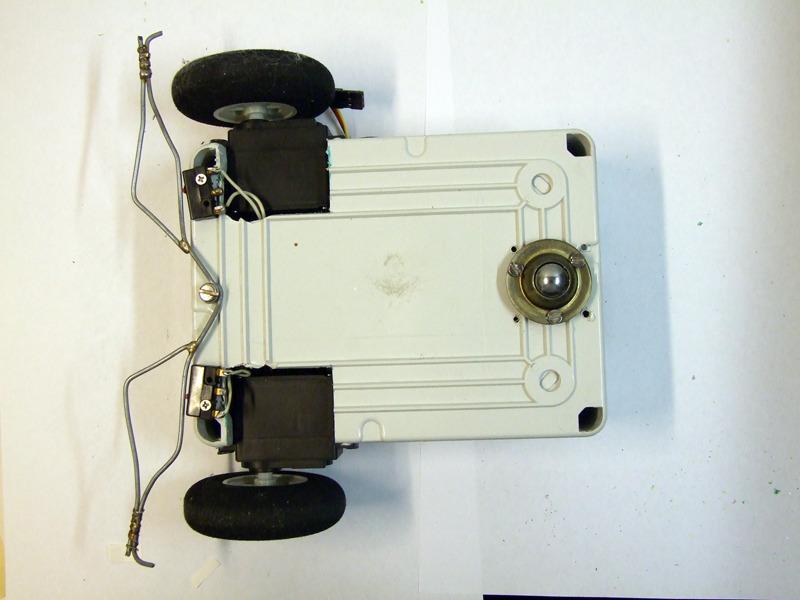
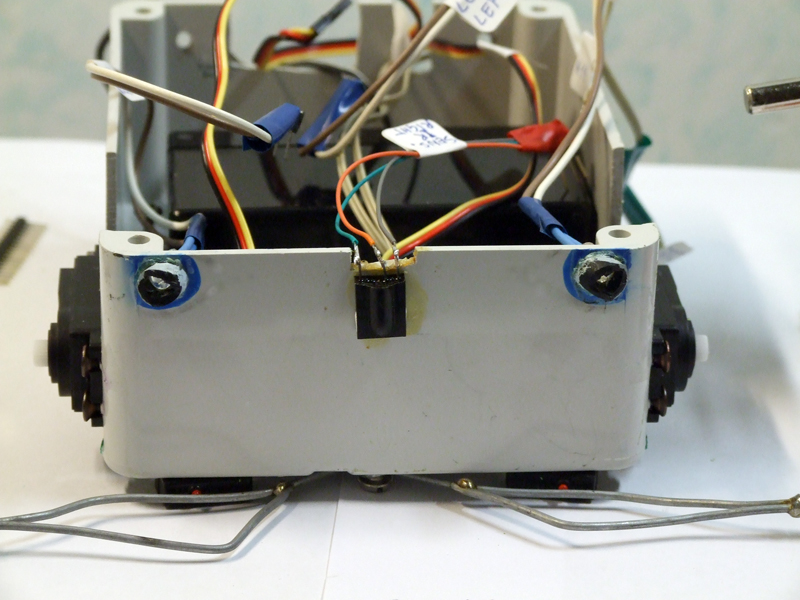
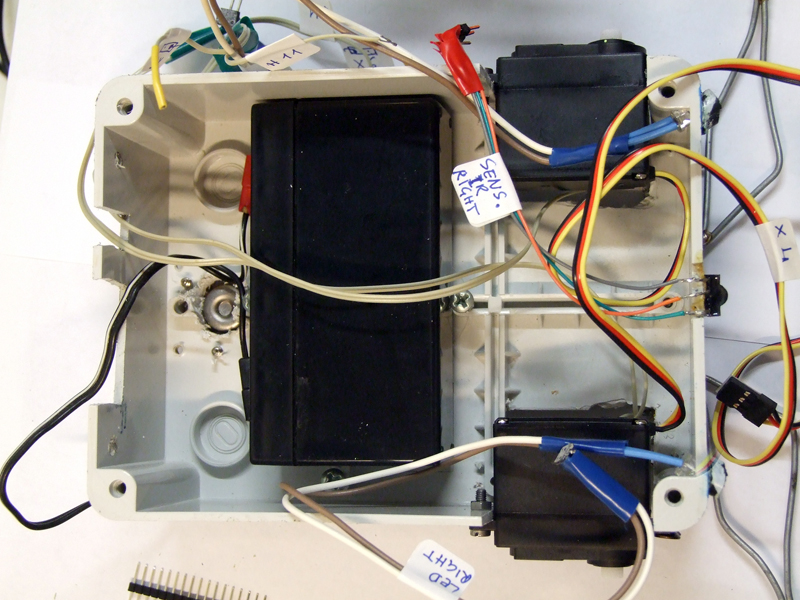
Il nome "Robot" non deve però trarre in inganno, deve essere un mezzo che si muove autonomamente, ma non necessariamente che abbia sembianze umane... questo in particolare si muove tramite motori collegati a ruote.
Il campo di gara è qualcosa di simile a questo:
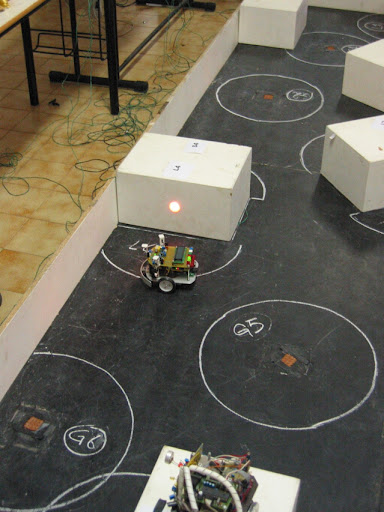
o a questo:

10 anni fa pur avendo superato le eliminatorie, non sono arrivato a classificarmi perchè:
1) Rispetto agli altri robot che partecipavano alla competizione il mio era decisamente più lento
2) Mentre gli altri robot erano stati costruiti durante l'anno scolastico dai ragazzi dell'Istituto Tecnico ed avevano quindi potuto essere provati nel campo di gara, io non avevo mai fatto girare il mio in un campo reale e quindi alcuni difetti sono usciti fuori soltanto al momento della gara.
Quest'anno ho deciso di partecipare nuovamente... ma prima ho intenzione di risolvere entrambi i problemi.
Partiamo dal secondo... ho bisogno di un campo di gara per far allenare il mio robottino...
Ovviamente, visto che non ho ne spazio ne molti soldi da spendere, il mio Campo di Gara o "Arena" come preferisco chiamarla, deve essere economica e soprattutto smontabile per evitare di trovare lei e me entrambi fuori dalla porta
Era naturale il ricorso alle perline prese al brico, un pacco ne conteneva 6 lunghe 2 m alte 14 cm e spesse 2 cm pagate 9,90 euri.
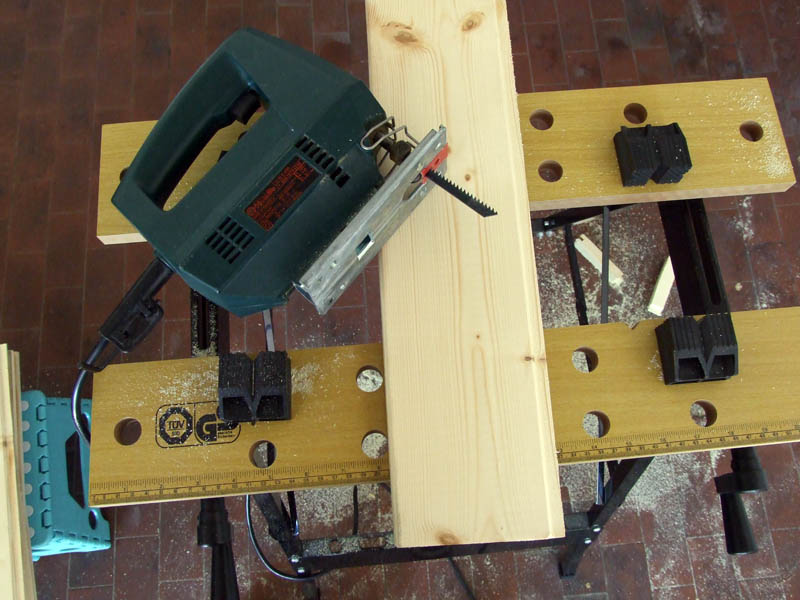
Quattro di queste le ho segate ad 1,60 m per fare le sponde del campo di gara (l'arena di gara reale aràdi 2 x 2 metri, ma lo spazio che ho nel salone è questo e quindi ho dovuto ridurre) i pezzi restanti li ho tagliati a lunghezze di 20 cm e 40 cm per costruire gli ostacoli
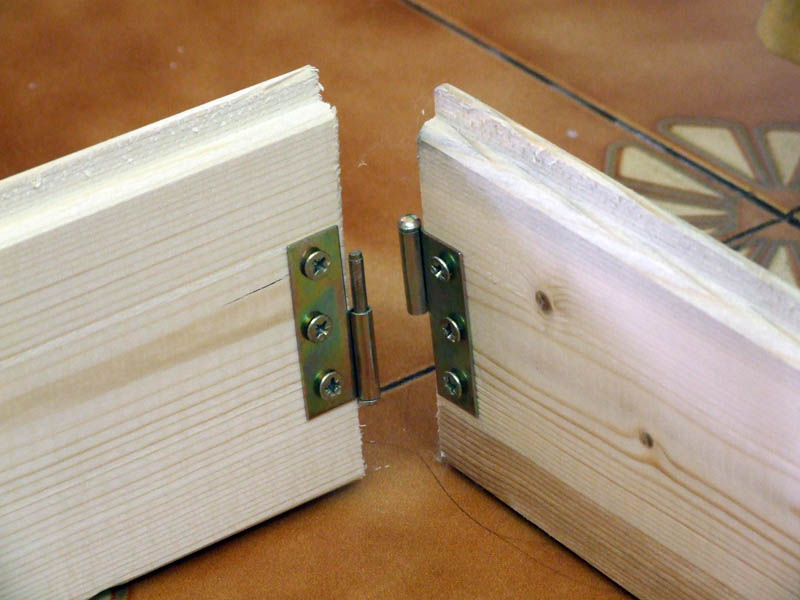
Per giuntare le sponde ho optato per delle cerniere smontabili (sempre dal brico a 3 euro la coppia)

Come sempre, prima di fissare le viti, ho effettuato dei fori "guida" con una punta da un paio di mm,questo evita che la vite possa spaccare il legno.
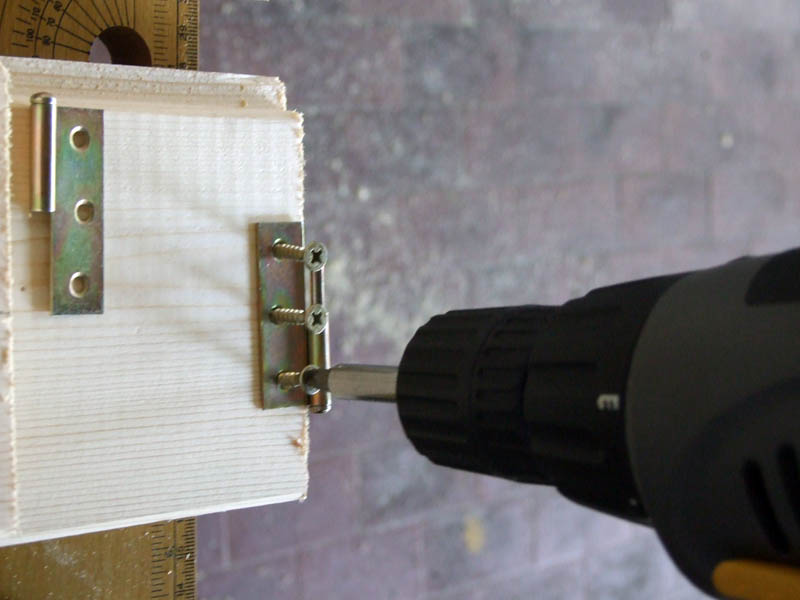
Questo è l'effetto quindi del sistema di giunzione finito
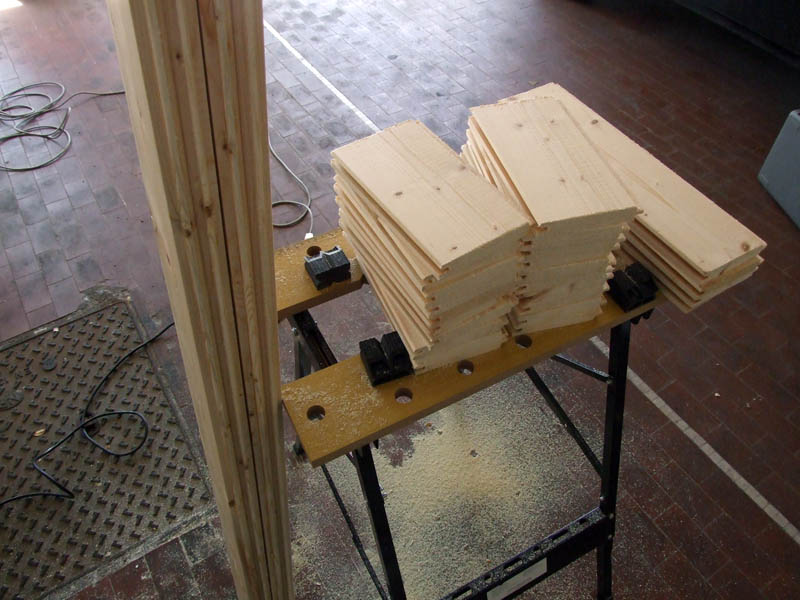
Per costruire gli ostacoli invece ho usato le spine di legno, che hanno il vantaggio, se usate senza colla, che possono essere facilmente smontate e rimontate.

Per sistemare le sorgenti luminose da rilevare ho fatto dei fori da 2 cm su un pezzo di ognuno degli ostacoli

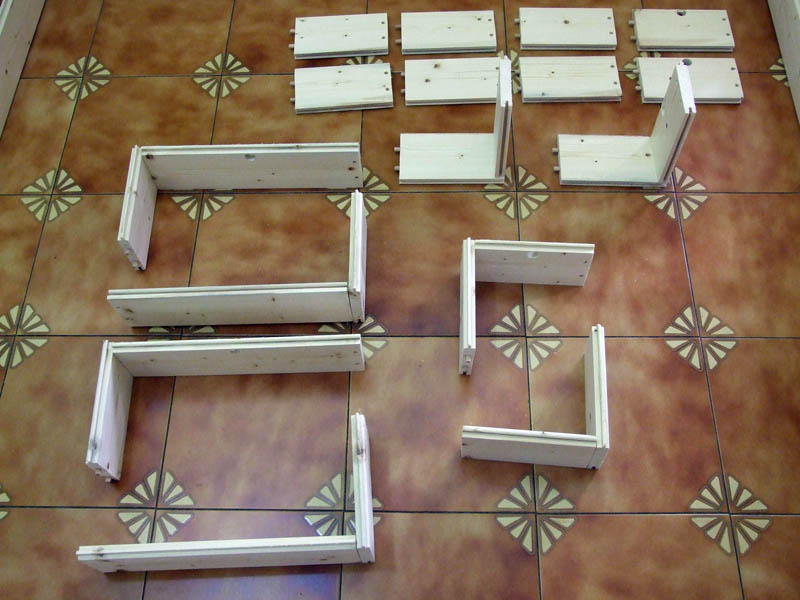
Questo è il risultato dei pezzi che compongono i sei ostacoli, tagliati, spinati e forati
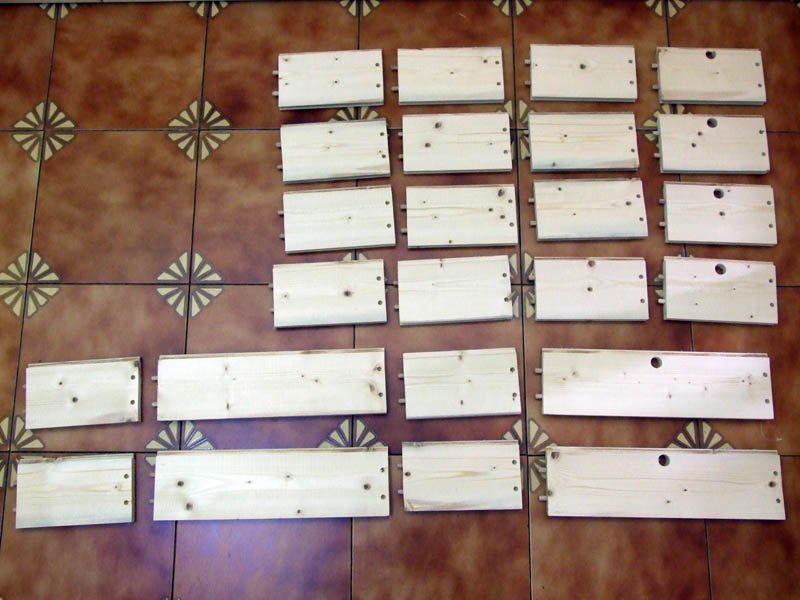
Se abbiamo usato bene la guida per i fori delle spine, i pezzi si monteranno con una certa facilità, ovviamente essendo stati fatti i fori tutti nelle stesse posizioni, i pezzi sono intercambiabili tra loro.
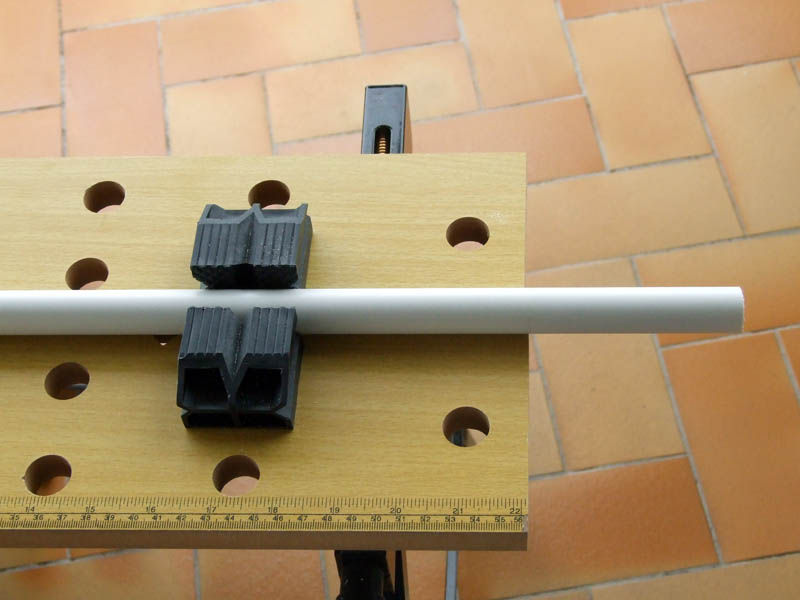
Poi ho preso una cannetta rigida da 2 cm di quelle che si usano per gli impianti elettrici (0,85 euro) ed ho tagliato 6 pezzi da 5 cm di lunghezza.
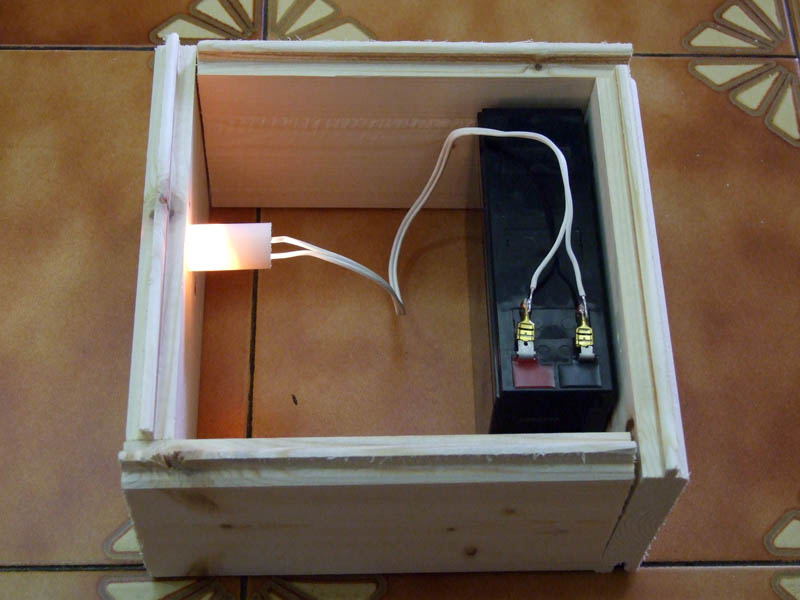
Per le sorgenti luminose ho utilizzato delle lampadine da automobile da 3 watt (1,50 euro la coppia) a cui ho saldato dei fili su cui alla fine ho saldato dei faston

Ho incastrato il pezzo di tubo tagliato nel foro fatto nel legno ed in questo ho inserito la lampadina. Per alimentare le lampadine ho utilizzato delle batterie recuperate dalla sostituzione periodica di un UPS di una azienda (quelle vecchie andavano smaltite ed ho chiesto se potevo prenderne qualcuna)
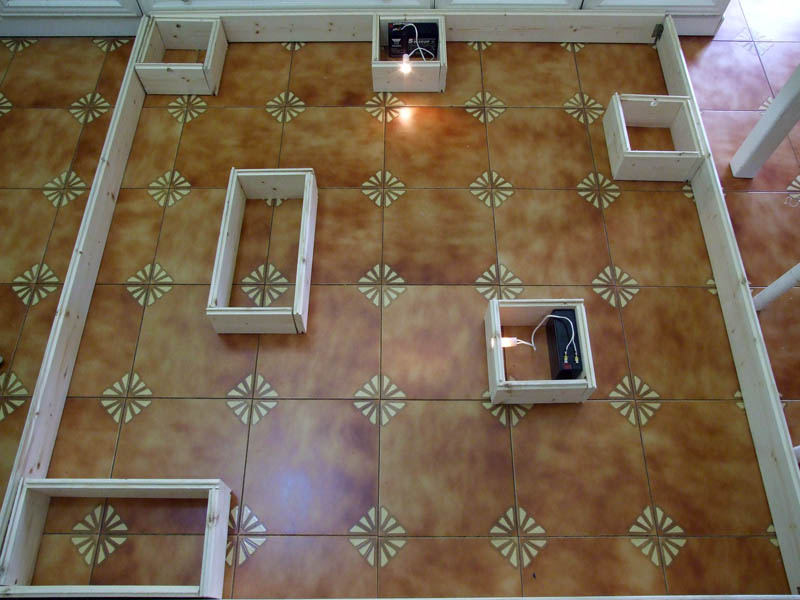
Montato il tutto questo è il risultato della arena in cui allenerò il mio robottino.
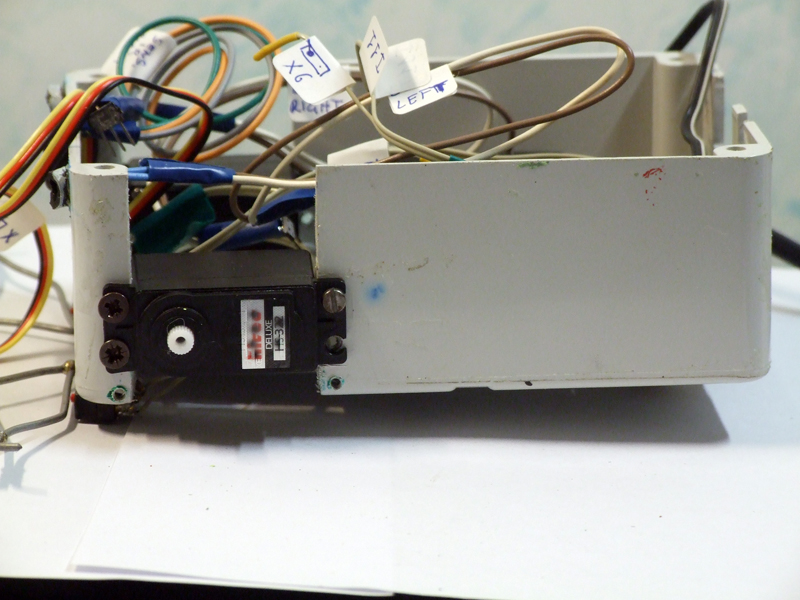
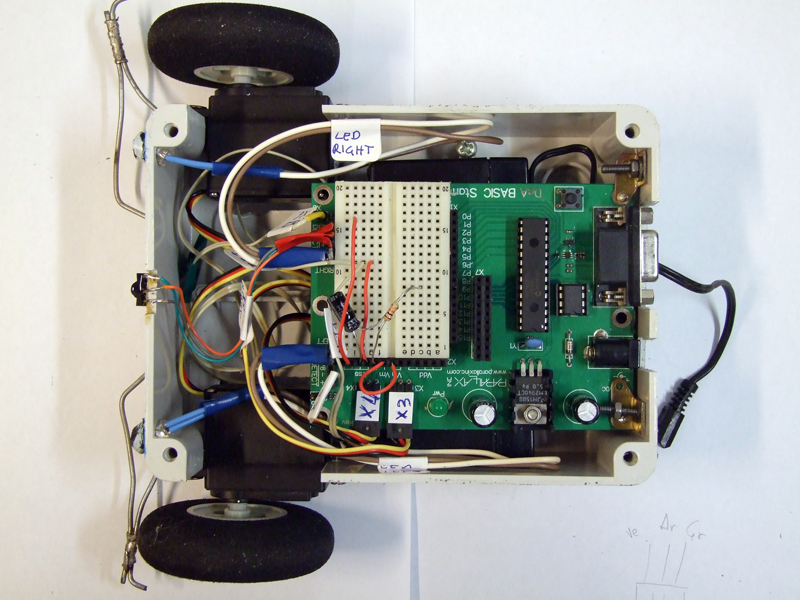
Tra qualche giorno cercherò di dare qualche spiegazione su come ho costruito il mio robottino... ovviamente con qualche foto, anche e lì è un po' più complicato perchè il robot è gia montato... ma vediamo cosa si può fare.
Se vi interessa... vi terrò aggiornati!

E' questa la ragione per cui, circa 10 anni fa, ho costruito un piccolo Robot Explorer Junior e con questo ho partecipato ad una competizione organizzata in una scuola di Roma.
Che cos'è un Robot Explorer Junior?
E' un piccolo robot in grado di muoversi autonomamente in un ambiente evitando degli ostacoli posti in posizione fissa ma sconosciuta all'interno del campo di gara ed in grado di rilevare delle sorgenti luminose poste anche queste in vari punti del campo:
https://www.pacinottiroma.it/robotica/ROBOTEXPLORER.pdf
Il nome "Robot" non deve però trarre in inganno, deve essere un mezzo che si muove autonomamente, ma non necessariamente che abbia sembianze umane... questo in particolare si muove tramite motori collegati a ruote.
Il campo di gara è qualcosa di simile a questo:
o a questo:
10 anni fa pur avendo superato le eliminatorie, non sono arrivato a classificarmi perchè:
1) Rispetto agli altri robot che partecipavano alla competizione il mio era decisamente più lento
2) Mentre gli altri robot erano stati costruiti durante l'anno scolastico dai ragazzi dell'Istituto Tecnico ed avevano quindi potuto essere provati nel campo di gara, io non avevo mai fatto girare il mio in un campo reale e quindi alcuni difetti sono usciti fuori soltanto al momento della gara.
Quest'anno ho deciso di partecipare nuovamente... ma prima ho intenzione di risolvere entrambi i problemi.
Partiamo dal secondo... ho bisogno di un campo di gara per far allenare il mio robottino...
Ovviamente, visto che non ho ne spazio ne molti soldi da spendere, il mio Campo di Gara o "Arena" come preferisco chiamarla, deve essere economica e soprattutto smontabile per evitare di trovare lei e me entrambi fuori dalla porta
Era naturale il ricorso alle perline prese al brico, un pacco ne conteneva 6 lunghe 2 m alte 14 cm e spesse 2 cm pagate 9,90 euri.
Quattro di queste le ho segate ad 1,60 m per fare le sponde del campo di gara (l'arena di gara reale aràdi 2 x 2 metri, ma lo spazio che ho nel salone è questo e quindi ho dovuto ridurre) i pezzi restanti li ho tagliati a lunghezze di 20 cm e 40 cm per costruire gli ostacoli
Per giuntare le sponde ho optato per delle cerniere smontabili (sempre dal brico a 3 euro la coppia)
Come sempre, prima di fissare le viti, ho effettuato dei fori "guida" con una punta da un paio di mm,questo evita che la vite possa spaccare il legno.
Questo è l'effetto quindi del sistema di giunzione finito
Per costruire gli ostacoli invece ho usato le spine di legno, che hanno il vantaggio, se usate senza colla, che possono essere facilmente smontate e rimontate.
Per sistemare le sorgenti luminose da rilevare ho fatto dei fori da 2 cm su un pezzo di ognuno degli ostacoli
Questo è il risultato dei pezzi che compongono i sei ostacoli, tagliati, spinati e forati
Se abbiamo usato bene la guida per i fori delle spine, i pezzi si monteranno con una certa facilità, ovviamente essendo stati fatti i fori tutti nelle stesse posizioni, i pezzi sono intercambiabili tra loro.
Poi ho preso una cannetta rigida da 2 cm di quelle che si usano per gli impianti elettrici (0,85 euro) ed ho tagliato 6 pezzi da 5 cm di lunghezza.
Per le sorgenti luminose ho utilizzato delle lampadine da automobile da 3 watt (1,50 euro la coppia) a cui ho saldato dei fili su cui alla fine ho saldato dei faston
Ho incastrato il pezzo di tubo tagliato nel foro fatto nel legno ed in questo ho inserito la lampadina. Per alimentare le lampadine ho utilizzato delle batterie recuperate dalla sostituzione periodica di un UPS di una azienda (quelle vecchie andavano smaltite ed ho chiesto se potevo prenderne qualcuna)
Montato il tutto questo è il risultato della arena in cui allenerò il mio robottino.
Tra qualche giorno cercherò di dare qualche spiegazione su come ho costruito il mio robottino... ovviamente con qualche foto, anche e lì è un po' più complicato perchè il robot è gia montato... ma vediamo cosa si può fare.
Se vi interessa... vi terrò aggiornati!